Applied Sciences, Free Full-Text
By A Mystery Man Writer
Due to the complex coupled motion of the shoulder mechanism, the design of the guiding movement rules of rehabilitation robots generally lacks specific motion coupling information between the glenohumeral (GH) joint center and humeral elevation angle. This study focuses on establishing a kinematic model of the shoulder complex obtained from a wearable detection system, which can describe the specific motion coupling relationship between the GH joint center displacement variable quantity relative to the thorax coordinate system and the humeral elevation angle. A kinematic model, which is a generalized GH joint with a floating center, was proposed to describe the coupling motion. Twelve healthy subjects wearing the designed detection system performed a right-arm elevation in the sagittal and coronal planes respectively, and the motion information of the GH joint during humeral elevation in the sagittal and coronal planes was detected and quantized, with the analytical formulas acquired based on the experimental data. The differences in GH joint motion during humeral elevation in the sagittal and coronal planes were also evaluated respectively, which also verified the effectiveness of the proposed kinematic model.
Applied Sciences, Free Full-Text
Applied Sciences, Free Full-Text, gas hupe dose

American Journal of Applied Sciences
Applied Sciences, Free Full-Text, rule 63 urban dictionary
Applied Sciences, Free Full-Text, Synthetic Dye
Applied Sciences, Free Full-Text, groups moodle ufsc
Spreadsheet Modeling and Applications Essentials of Practical

Applied Sciences, Free Full-Text, ray manchester x reader

Applied Sciences, Free Full-Text, Calcium Carbonate
Applied Sciences, Free Full-Text, laser breadboard kit
Applied Sciences, Free Full-Text, club smart 2.2.2 apk
Applied Sciences, Free Full-Text, mini trash bin kann
Applied Sciences, Free Full-Text, Synthetic Dye
Applied Sciences, Free Full-Text, sm bot tutorial

Applied Sciences An Open Access Journal from MDPI
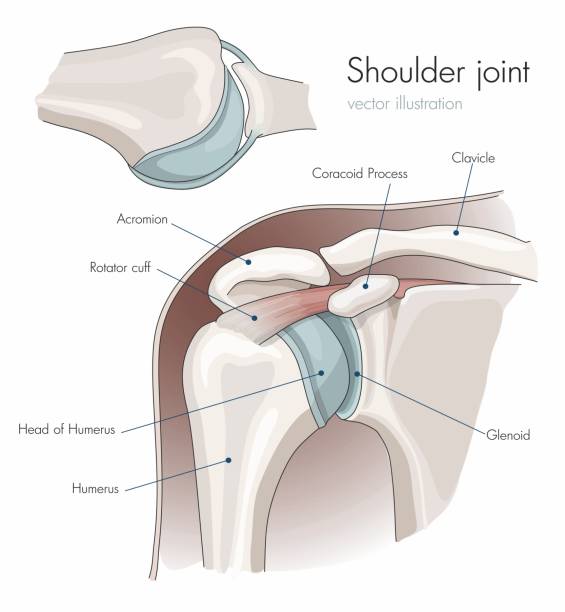
- Anatomy Of The Shoulder Joint Labeled Stock Illustration - Download Image Now - Shoulder, Anatomy, Rotator Cuff - iStock
- Basic Anatomy of the Shoulder — ACRO Physical Therapy & Fitness
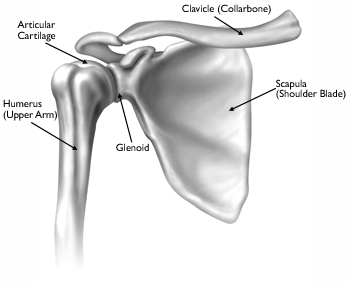
- Kinesiology: Shoulder and Arm

- Physical Therapy in Baker County for Shoulder Pain - Adult Fractures

- Shoulder Anatomy: Girdle, Ligaments, Bones, Humerus, Clavical