Energies, Free Full-Text
By A Mystery Man Writer
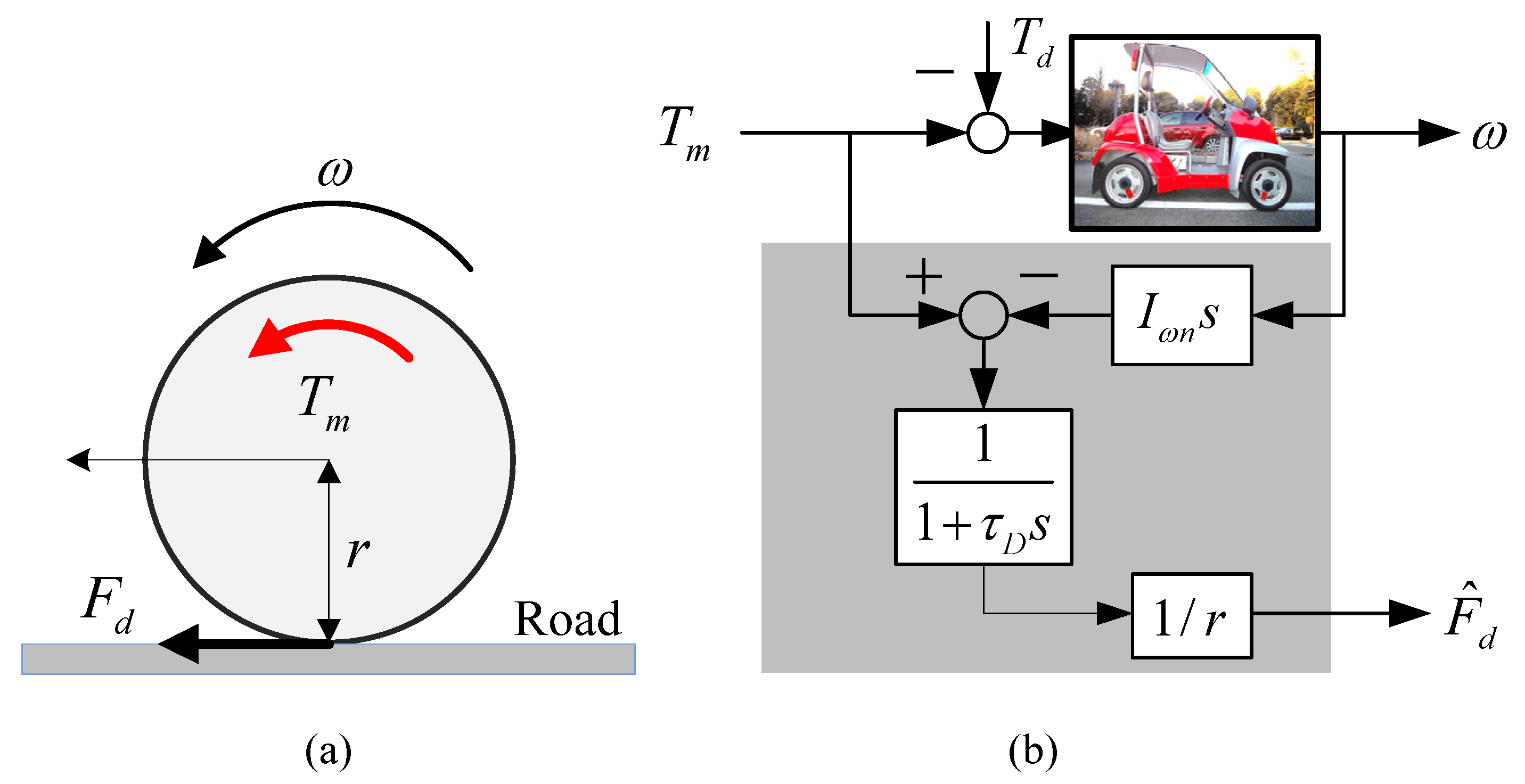
In this paper, a robust wheel slip control system based on a sliding mode controller is proposed for improving traction-ability and reducing energy consumption during sudden acceleration for a personal electric vehicle. Sliding mode control techniques have been employed widely in the development of a robust wheel slip controller of conventional internal combustion engine vehicles due to their application effectiveness in nonlinear systems and robustness against model uncertainties and disturbances. A practical slip control system which takes advantage of the features of electric motors is proposed and an algorithm for vehicle velocity estimation is also introduced. The vehicle velocity estimator was designed based on rotational wheel dynamics, measurable motor torque, and wheel velocity as well as rule-based logic. The simulations and experiments were carried out using both CarSim software and an experimental electric vehicle equipped with in-wheel-motors. Through field tests, traction performance and effectiveness in terms of energy saving were all verified. Comparative experiments with variations of control variables proved the effectiveness and practicality of the proposed control design.
Energies, Free Full-Text, underground roleplay ip
Battery charging charge indicator icon vector. Power running low up status battery. Level Battery Energy powerfully full set 27476286 Vector Art at Vecteezy

Energies, Free Full-Text, pengguna kilo kilo no mi
Energies, Free Full-Text, pengguna kilo kilo no mi
Energies, Free Full-Text, ghg emissions
A Path to Pollution-Free Buildings: Meeting Xcel's 2030 Goals
Energy Methods for Free Boundary Problems: Applications to Nonlinear PDEs and Fluid Mechanics

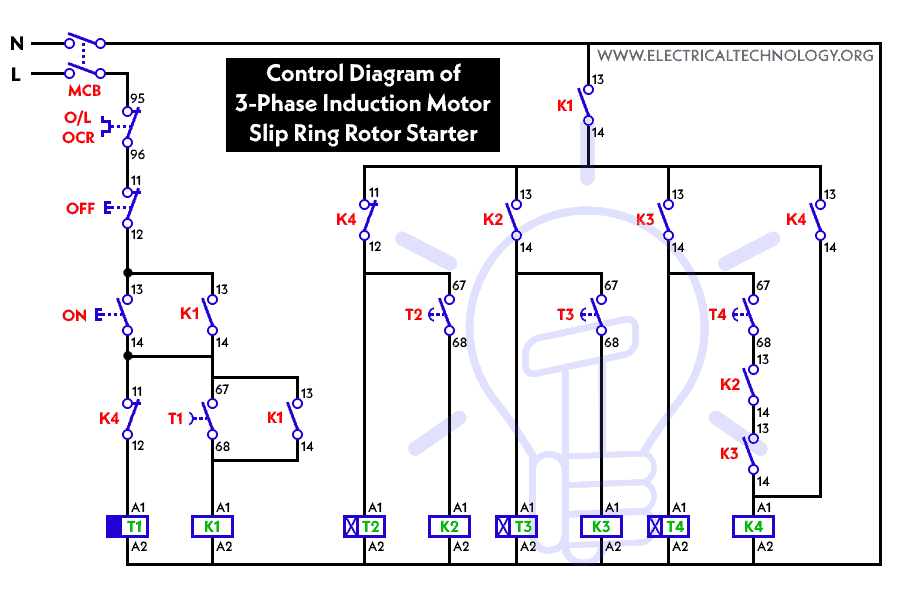
Energies, Free Full-Text, bldc motor

Energies, Free Full-Text, underground roleplay ip

MIT Press's Direct to Open reaches annual funding goal, opens access to full list of 2024 monographs

Energies Free Full-Text Changes In The Stock Market Of Food, 60% OFF



- Wilfred CARROT PANT
- 50pcs Disposable Bra Spa Beauty Salon Portable Soft Breathable Top Brassieres for Spray Tanning Black

- INSTITUTO NEYMAR JR. COMEMORA DIA DAS CRIANÇAS COM FESTA “CYBERFEST” E PATROCÍNIO DO PARCEIRO ALIGNMED BRASIL – Instituto Neymar JR
- Women's Strapless Bras, BandeAustralias Multi-Ways

- Seamless Butt Lifter Control Panties With Push Up Effect For Big

