Friday, Oct 04 2024
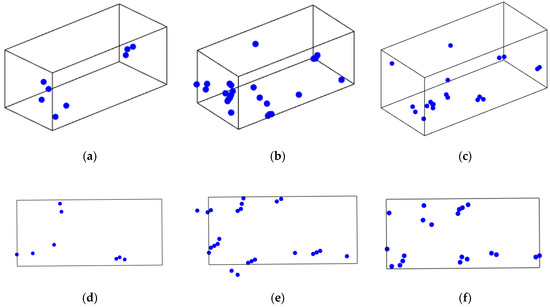
Output view. The motion state θ (k+1)oi of the motion target
By A Mystery Man Writer
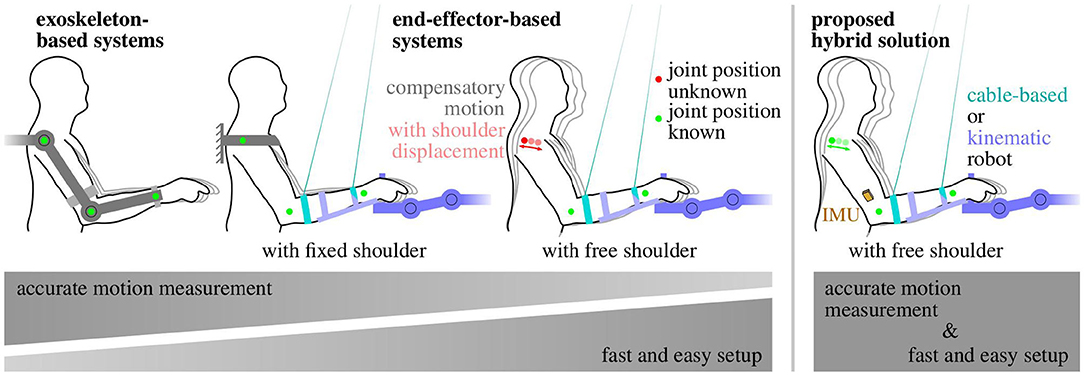
Frontiers Inertial-Robotic Motion Tracking in End-Effector-Based Rehabilitation Robots

Sensors, Free Full-Text

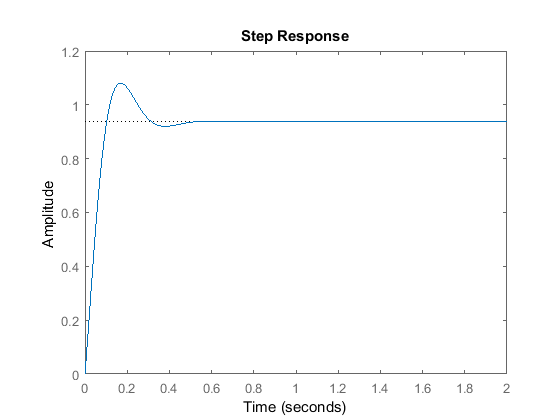
Step response of dynamic system - MATLAB step

5.3 Projectile Motion

Output view. The motion state θ (k+1)oi of the motion target labeled as
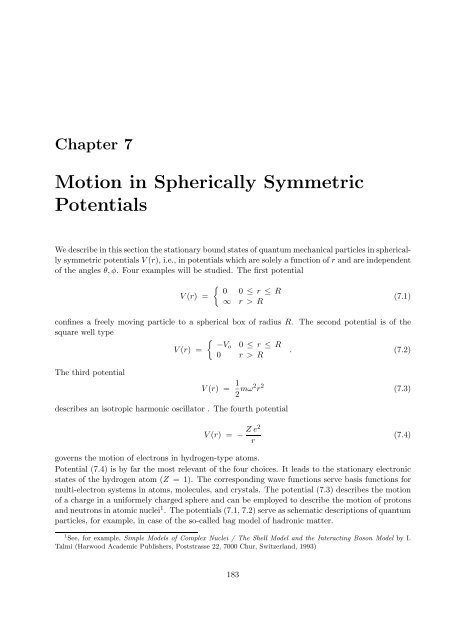
Chapter 7: Motion in Spherically Symmetric Potentials
Control Tutorials for MATLAB and Simulink - Introduction: PID Controller Design

8.3 Elastic and Inelastic Collisions
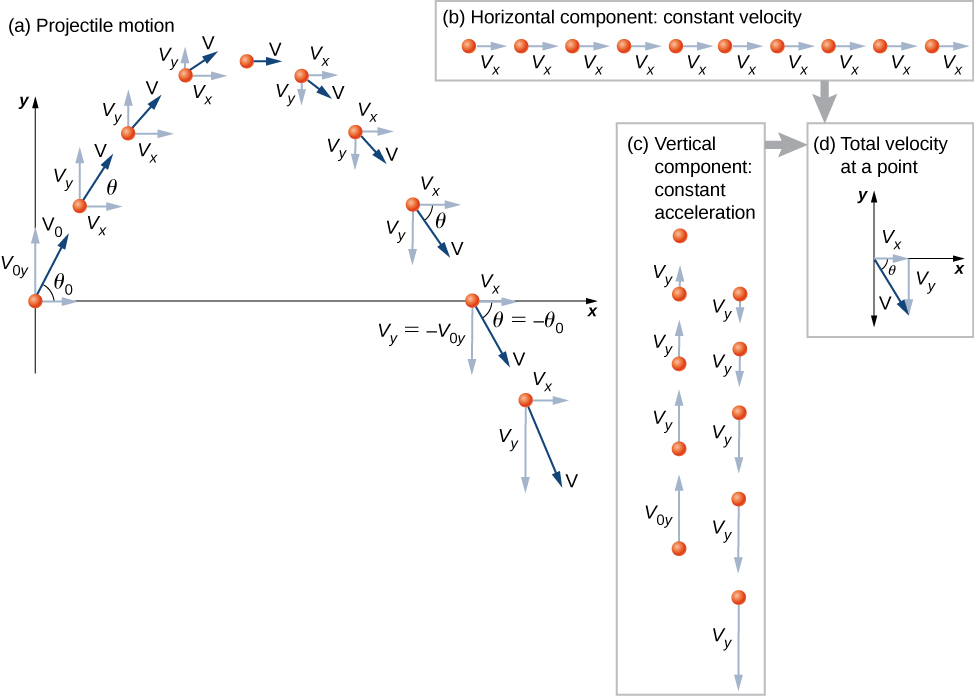
4.3 Projectile Motion University Physics Volume 1
/presentations/quantum-simulate-chemistry/en/slides/sl1-1554937948248.jpg)
Using Quantum Computers to Simulate Chemistry - InfoQ
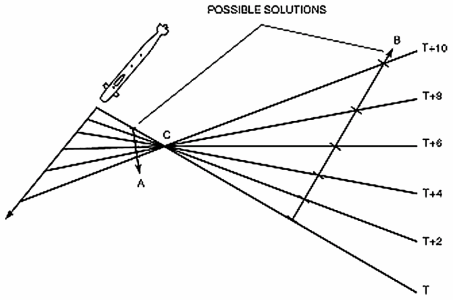
Performing Automatic Target Motion Analysis - Adam Milazzo's Personal Site
Remote Sensing, Free Full-Text
Related searches



Related searches
- MUNKI MUNKI Women's 3-Piece Costco PJ's XS Pajamas Lounge Set Shirt Pants for sale online

- Well foundation
- Italian Stretch Rayon Nylon Ponte Knit - Red – Fabrics & Fabrics

- Depend Adult Incontinence Underwear for Women, Disposable, Maximum Small Blush

- Bow Back Stocking Suspender Set by Ann Summers Online, THE ICONIC
:fill(ffffff)/http%3A%2F%2Fstatic.theiconic.com.au%2Fp%2Fann-summers-9804-028969-1.jpg)
©2016-2024, changhanna.com, Inc. or its affiliates